-
대학/대학원
-
연구/산학
-
대학생활
-
입학/취업
-
커뮤니티
-
대학소개
-
개교 80주년
커뮤니티
부경투데이
- 국립 부경대학교의 다양한 모습과 소식을 접하시면 부경대학교가 한번 더 가까워집니다.
| '뱀 로봇' 머리 제어 연구 '주목' (Research on head control of 'snake robot' attracting attention) | |||
| 작성자 | 대외협력과 | 작성일 | 2024-03-04 |
| 조회수 | 571 | ||
| '뱀 로봇' 머리 제어 연구 '주목' (Research on head control of 'snake robot' attracting attention) | |||||
 |
대외협력과 |  |
2024-03-04 |  |
571 |
국립부경대 서진호 교수팀, ‘뱀 로봇’ 제어 연구로 우수논문상
- 한국로봇종합학술대회에서 발표 … 뱀형 로봇 활용도 높여
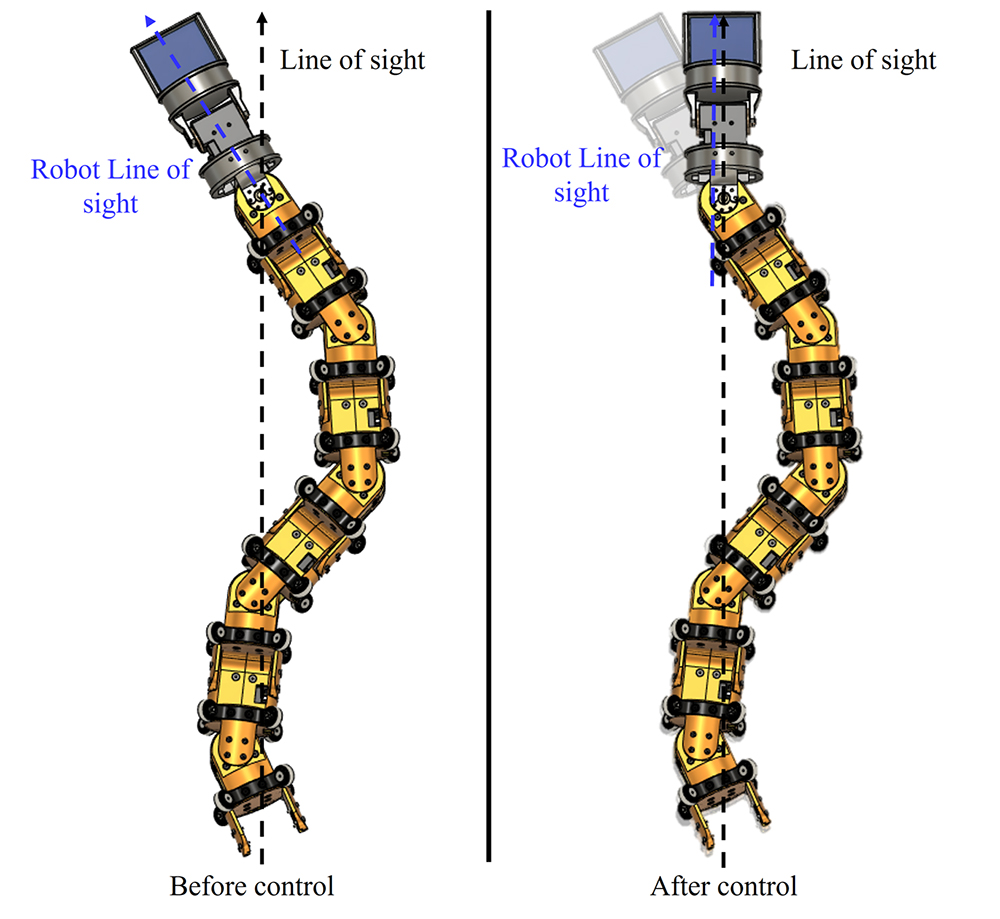
△ 뱀형 로봇의 머리부 제어 콘셉트 이미지.
국립부경대학교 서진호 교수(기계시스템공학전공) 연구팀은 제19회 한국로봇종합학술대회에서 (KRoC2024) 우수논문상을 수상했다고 밝혔다.
서진호 교수 연구팀은 지난달 21일부터 24일까지 휘닉스평창에서 열린 이번 학술대회에서 논문 ‘RBF 신경망과 강인 제어를 이용한 I-PID 기반 뱀 로봇 머리제어에 관한 연구’로 포스터 부문에서 우수한 평가를 받았다.
한국로봇종합학술대회는 (사)한국로봇학회와 한국로봇산업진흥원이 공동으로 로봇 분야의 다양한 공학 지식을 공유하고, 로봇 관련 학술 분야의 확대를 위해 개최하는 국내 최대 규모의 로봇 관련 학술대회다.
서진호 교수 연구팀은 이번 연구에서 협소한 공간을 탐색하는 등의 용도로 사용되는 뱀형 로봇에 인공지능 기법의 하나인 RBF 신경망과 시스템의 불확실성을 제어하는 이론 중 하나인 강인 제어(robust control)를 이용해 효과적인 머리제어 방법을 제시했다.
연구팀은 뱀형 로봇의 머리부 관절 일부를 독립적으로 제어하는 전략을 제시하고, 인공 신경망과 결합한 강인 제어방법을 통해 뱀형 로봇이 주행 중 발생하는 카메라 흔들림을 최소화하는 방법을 밝혔다.
서진호 교수는 “이번 연구가 모바일 로봇으로서 뱀형 로봇의 활용도를 높일 수 있는 기초 연구로 활용될 것으로 기대한다.”라고 밝혔다. <부경투데이>
Prof. Seo Jin-Ho's team at PKNU received the best paper award for their research on 'snake robot' control
- presented at the Korea robotics society annual conference, increased the usability of snake robots
The research team led by Professor Seo Jin-Ho (mechanical systems engineering) at Pukyong National University announced that the team won the best paper award at the 19th Korea robotics society annual conference (KRoC2024).
Professor Seo Jin-Ho's team received an excellent evaluation in the poster category for their paper 'research on I-PID-based snake robot head control using RBF neural network and robust control' at this academic conference held at Phoenix Pyeongchang from the 21st to the 24th of last month.
The Korea robotics annual society conference is Korea's largest robot-related academic conference jointly held by the Korea robotics society and the Korea robot industry promotion institute to share various engineering knowledge in the robotics field and expand the academic field related to robots.
In this study, the research team presented an effective head control method for a snake robot used for purposes such as exploring narrow spaces using RBF neural network, an artificial intelligence technique, and robust control, which is one of the theories for controlling uncertainty in the system.
The research team suggested a strategy to independently control the joints of the snake robot's head and revealed a method to minimize camera shake that occurs while driving the snake robot through robust control combined with an artificial neural network.
Professor See Jin-Ho said, "I expect that our team's research will be used as basic research to increase the usability of snake-shaped robots as mobile robots."