-
대학/대학원
-
연구/산학
-
대학생활
-
입학/취업
-
커뮤니티
-
대학소개
-
개교 80주년
커뮤니티
부경투데이
- 국립 부경대학교의 다양한 모습과 소식을 접하시면 부경대학교가 한번 더 가까워집니다.
| 소프트 로봇 개발 연구 '주목' (Research on the development of soft robots attracts attention) | |||
| 작성자 | 대외협력과 | 작성일 | 2023-05-31 |
| 조회수 | 722 | ||
| 소프트 로봇 개발 연구 '주목' (Research on the development of soft robots attracts attention) | |||||
 |
대외협력과 |  |
2023-05-31 |  |
722 |
부경대, LCE 활용 자율 운동 소프트 로봇 개발 ‘주목’
- 김대석 교수팀 연구 … 국제학술지 <Science Advances> 게재
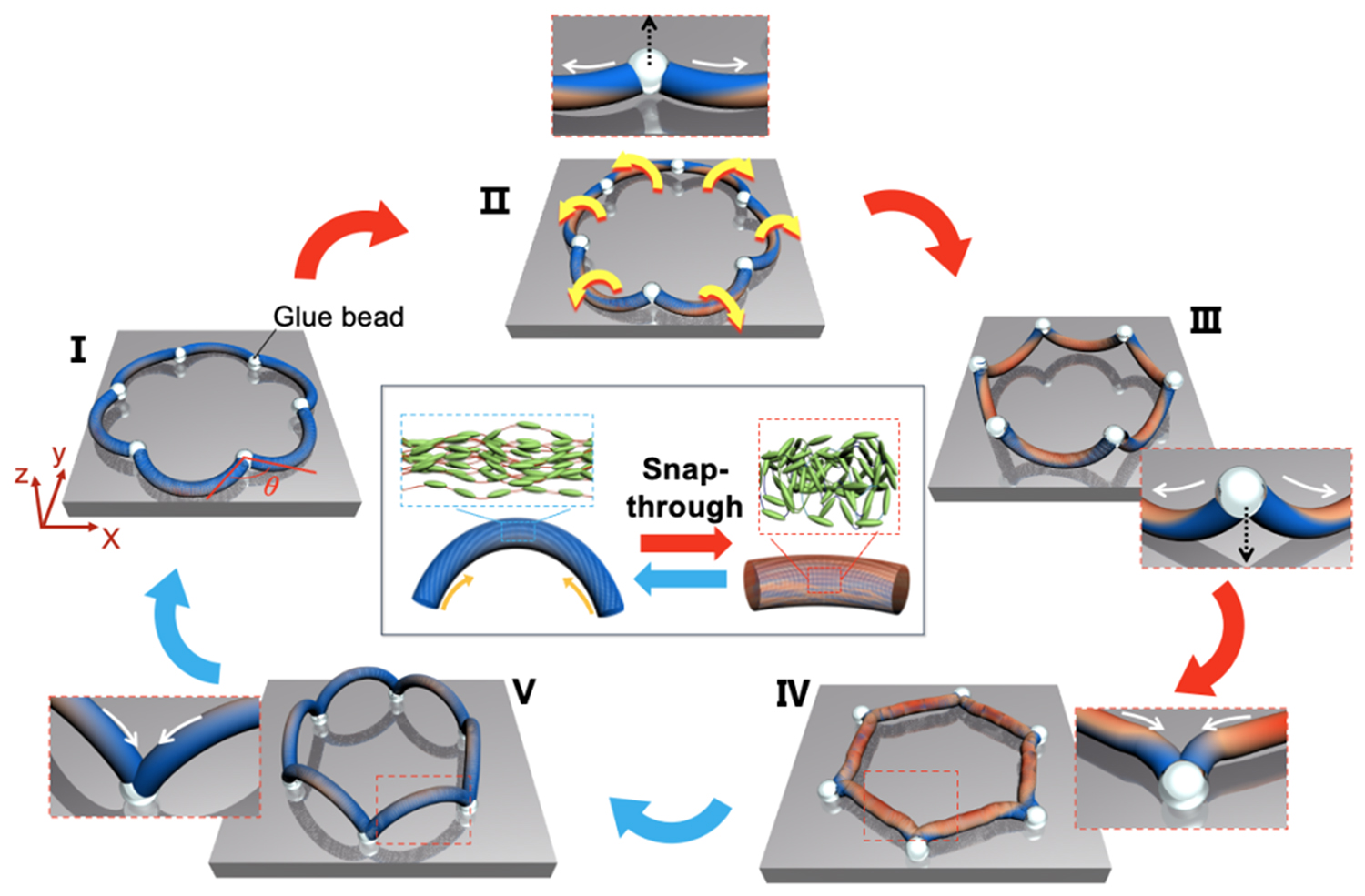
△ loop 형태로 연결된 액정 엘라스토머 필라멘트 구조의 자기조절 구동을 나타낸 그림.
국립부경대학교 김대석 교수(고분자공학전공)팀이 액정 엘라스토머(LCE, Liquid Crystal Elastomer) 신소재를 활용해 자율 운동하는 소프트 로봇을 개발해 주목된다.
김 교수는 같은 과 김영빈 석사과정생, 펜실베이니아대학교 슈양 교수(재료공학과)와 공동연구를 통해 반응성 고분자물질인 LCE의 필라멘트 구조를 활용해 자율적이고 지속 가능한 운동을 구현하는 소프트 로봇을 제작했다.
소프트 로봇은 인간 생활과 밀접한 분야나 위험한 조건 등에 사용될 수 있도록 금속이 아닌 유연한 소재로 만든 로봇을 말한다.
소프트 로봇용으로 활용할 수 있는 LCE는 열이나 빛, 전자기장 등 외부 자극에 반응해 형상을 변형하는 스마트 물질로, 연성 소재 기반 구동 시스템 분야에서 주목받고 있다. 다만 자극에 따른 수축-이완 과정이 수 초에서 수십 초 수준으로 매우 둔하고, 움직임의 세기인 출력도 낮은 한계가 있었다.
김 교수 연구팀은 LCE로 필라멘트를 제작한 뒤, 필라멘트끼리 연결해 기존에 없던 새로운 기하학적인 연결구조인 루프(loop) 형태의 구동기를 디자인했다.
연구팀이 이 구동기에 열 자극을 준 결과, 각 필라멘트가 수축하고 이완하는 형상 변형 움직임이 연결된 다른 필라멘트들에 영향을 주면서 구동기가 빙글빙글 돌아가는 운동 현상을 유도하는 데 성공했다. 연구팀은 이 현상을 ‘스냅-스루(snap-through)’라고 칭했다.
이 구동기는 기존 LCE 자체에 자극을 주었을 때와 달리, 계속적이면서도 훨씬 빠르고 높은 출력을 낼 수 있어 소프트 로봇 등 다양한 기기의 구동장치로 활용할 수 있을 것으로 기대된다. 또 작은 열 자극으로도 구동할 수 있어, 열 손실이 발생하는 곳에서 구동 시 에너지도 절약할 수 있는 것으로 나타났다.
김대석 교수는 “액정 엘라스토머 기반 소프트 로봇을 제작하는데 새로운 물질의 합성도 중요하지만, 기존의 잘 정립된 물질의 구조화 및 기하학적 모델에 관한 연구만으로도 전혀 새로운 물리적 현상을 유도할 수 있다는 것을 보여주었다는 의의가 있다.”라고 밝혔다.
이 연구 결과를 담은 논문 ‘Autonomous, untethered gait-like synchronization of lobed loops made from liquid crystal elastomer fibers via spontaneous snap-through’는 최근 국제학술지 <Science Advances>(IF:14.98)에 게재됐다. <부경투데이>
△ 김대석 교수(왼쪽)와 김영빈 석사과정생).
Autonomous soft robots using LCE developed by PKNU getting attention
- prof. Kim Dae-Seok published a paper in international journal, <Science advances>
A team led by professor Kim Dae-Seok (polymer Engineering) from Pukyong National University has developed a soft robot that moves autonomously using a new material called liquid crystal elastomer (LCE), drawing attention from the academic world.
Through joint research with Kim Young-Bin in master's degree, who is currently enrolled in the same department, and professor Shu Yang (dept. of materials engineering) from the university of Pennsylvania, professor Kim developed a soft robot that realizes autonomous and sustainable movement by utilizing the filament structure of LCE, a reactive polymer material.
Soft robots refer to robots made of flexible materials, not metal, so that they can be used in areas closely related to human life or in dangerous conditions instead of humans.
LCE, which can be applied for soft robots, is a smart material that transforms its shape in response to external stimuli such as heat, light, and electromagnetic fields, and has attracted attention in the soft material-based drive systems. However, there was a limitation that the process of contraction and relaxation according to stimulation was very dull, from several seconds to several tens of seconds, and the output, which is the intensity of movement, was also low.
The research team led by professor Kim produced a filament with LCE and then connected the filaments to each other to design a new loop-type actuator, a new geometric connection structure that did not exist before.
As a result of the research team applying thermal stimulation to this actuator, the motion of each filament contracting and relaxing affected other connected filaments and succeeded in inducing a motion phenomenon in which the actuator rotates round and round. The research team named this phenomenon 'snap-through'.
This actuator is expected to be used as a driving device for various devices such as soft robots in the future, as it can continuously produce much faster and higher output than when stimulating the existing LCE itself. In addition, since it can be driven with a small thermal stimulus, it has been shown that energy can be saved if driven in a place where heat loss occurs.
Professor Kim Dae-Seok said, "Synthesis of new materials is still important in manufacturing LCE-based soft robots, but it is meaningful that we have demonstrated that completely new physical phenomena can be induced only by studying the structuring and geometric models of well-established materials."
The paper 'autonomous, untethered gait-like synchronization of lobed loops made from liquid crystal elastomer fibers via spontaneous snap-through' containing the results of this research was recently published in the international journal <science advances> (IF: 14.98). <Pukyong Today>